目前,在许多方面得到了应用,诸如工业机器人控制、数控机床控制等。于是,多机之间的通信便成为多机系统的技术关键。特别是对数据传送有特殊要求的场合,更要解决好多机间的通信问题。如在工业机器人的控制中,对数据的传送就有如下要求:①主、从机要共享许多数据;②主、从机需要快速交换信息。在这种特殊要求下,传统的串行、并行通信就难以满足要求,而采用多机电路,既能满足要求,又具有简单、可靠、通用性好等优点。
一、电路原理
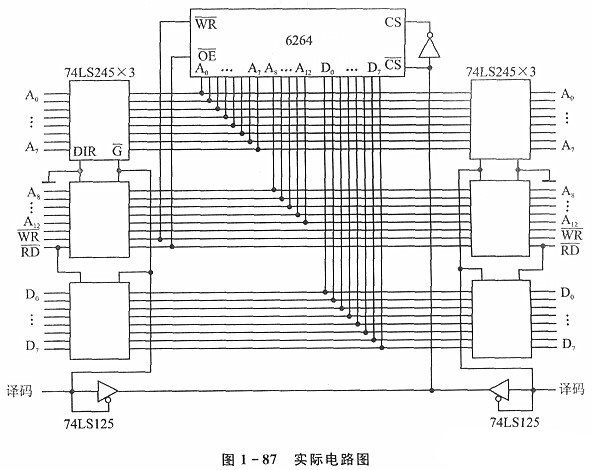
图1- 87所示为实际电路图。图中共用的RAM为6264.它有8根数据总线(Do~D7),13根地址总线( Ao~A12),4根控制总线(WR、OE、CS、CS),2根电源线。当两微机系统共用RAM时,必须用缓冲器将其隔离。当某机需要占用时,则对一机导通,而对另一机隔离;否则两机将同时出现故障。在图1- 87所示电路中,缓冲器选用74LS245,它是8位双向缓冲器。因为6264共有24根总线,故用6片74LS245与一片74LS125三态门。74LS245有一个方向控制端DIR,一个允许端G。DIR直接接于RD或接固定电位(+5 V,0 V)。用于数据线缓冲时,DIR要接RD;用于地址线和控制线时,DIR要接固定电位(+5 V,0 V)。一般的CPU,RD信号总是出现在地址信号的后面,如8080、8031等。如果G接于RD,则会出现RAM数据还没准备就写或读,系统就会出现故障。因此,G接于系统的译码端是比较合适的。