随着人工成本的不断升高,用机器人代替人力去做一些重复性的高强度的劳动是现代机器人研究的一个重要方向。搬运机器人在导航寻迹中,需要后轮驱动电机和前轮舵机的协调工作。搬运机器人电机驱动有其特殊的应用要求,对电机的动态性能要求较高,能在任意时刻到达控制需要的指定位置并且使舵机停止在任意角度;电机驱动的转矩变化范围大,既有空载平整路面行使的高速度、低转矩工作环境,也有满负载爬坡的运行工况,同时还要求保持较高的运行效率。根据以上的技术要求,本文选用了控制技术成熟,易于平滑调速的直流电机作为搬运机器人的执行饥构。
功率驱动的设计
电机的供电电源是由24V的蓄电池提供,额定功率为240W,由4个75N75组成桥式电路来实现。75N75是MOSFET功率管,其最高耐压75V,最高耐流75A,电机驱动电路如图2所示。 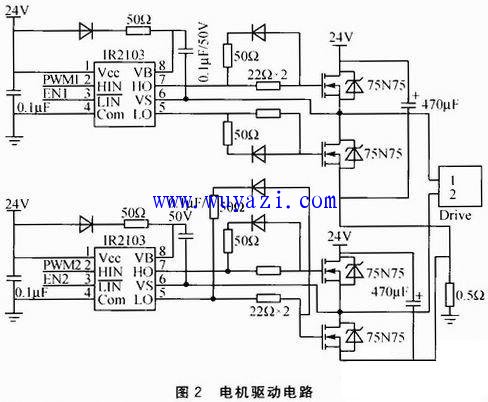 查看联系方式
查看联系方式
搬运机器人电机控制电路图
版权声明:网站转载的所有的文章、图片、音频视频文件等资料的版权归版权所有人所有。如果本网所选内容的文章作者及编辑认为其作品不宜公开自由传播,或不应无偿使用,请及时联络我们,采取适当措施,避免给双方造成不必要的经济损失。