目前制造业市场上,工业机器人具有相当大的市场潜力,要使工业机器人真正应用于生产线上的各个方面,满足人们日益增长的需求,就离不开高性能的语音识别控制系统。随着计算机软硬件技术、半导体技术、电子技术、通讯技术等的飞速发展人类已经进入后PC时代。语音识别技术得到了迅猛发展, 支持语音识别的各种产品纷纷面世。人类实现了语音命令控制空调、电视、灯光、自动窗帘等的使用,让人们的生活“随音所欲”,更加舒适,更加便捷。基于凌阳16位SPCE061A单片机设计了一个具有语音识别功能的机器人。在经过训练后使机器人对训练人的命令做出应答,完成跳两首舞曲、走步、转向、转头、发射飞盘等动作。
语音识别可划分为训练和识别两个过程。在第一阶段,语音识别系统对人类的 语言进行学习,把学习内容组成语音库存储起来,在第二阶段就可以把当前输入的语音在语音库中查找相应的词义或语义。凌阳16位SPCE061A单片机内嵌32K字闪存,2K字SRAM,内置10位ADC、DAC,有多达14个的中断源。它的CPU内核采用16位具有DSP功能的微处理器芯片, 而且CPU可最高工作在49MHz的主频下,能够非常容易地、快速地处理复杂的数字信号,因此与其他类型的单片机相比,在数字语音处理方面SPCE061A更具有优势。基于SPCE061A设计了一个具有语音识别功能的机器人。经过训练,训练人可使用各种命令让机器人完成许多有趣的动作,使得人机交互更具智能化。
SPCE061A最小系统
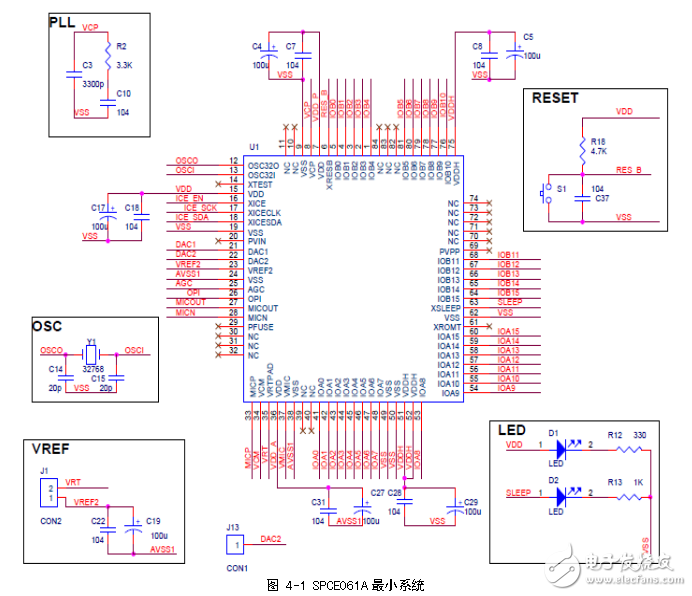
SPCE061A最小系统中,含有SPCE061A芯片外围的基本模块,其主要由晶体输入模块(OSC)、锁相环外围电路(PLL)、复位电路(RESET)、指示灯(LED)等组成,参看图 4-1。在OSC32O、OSC32I端口接上晶体振荡器和谐振电容,在VCOIN端口接上相对应的电容和电阻后即可工作。在其他不用的VDD端口和GND端口也不能悬空应该接上0.1uF的耦合电容以提高抗干扰能力。 图 4-1 SPCE061A最小系统。
时钟电路设计
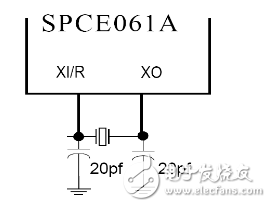
日常生活中的钟表、实时时钟延时以及其他与时间相关产品所采用的是32768Hz的实时时钟。在SPCE061A时钟电路中使用的是晶体振荡器,采用频率为32768Hz外接晶体,SPCE061A时钟电路的连线图可参看图。
锁相环电路设计
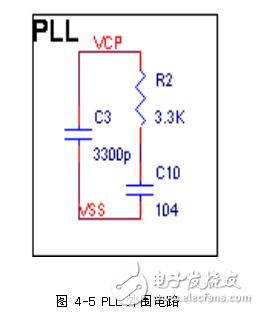
锁相环(Phase Lock Loop)是将32768Hz的实时时钟(RTC)进行倍频,调整至49.152MHz、40.96MHz、32.768MHz、24.576MHz或20.480MHz的系统时钟Fosc参看图。
电源模块
电源输入端口是61板的能源供应中心,整块板子的电源都是由此提供进去,可采用电池或稳压电源提供5V输入,并且必须至少保证电流在50mA以上,否则会造成系统无法倍频和下载出错。SPCE061A的内核供电为3.3V,由于I/O端口可接3.3V也可以接5V,所以在电源模块中有一个端口电平选择跳线J5用于选择端口电压,电源模块参看图,如下:
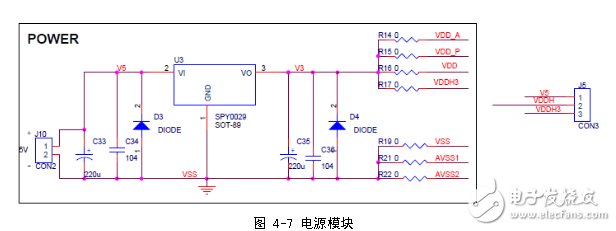
由于此系统需要的端口高电平为5V,所以图当中的J5跳线需要跳到1和2上。
放音电路设计
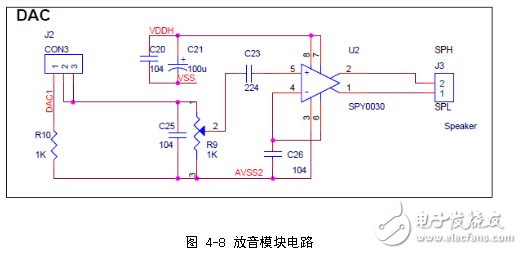
将HM628128A中存储的语音数据顺序取出,解码后,以8kHz的速率进行D/A转换输出,语音数据经电容滤波恢复成原始语音波形,最后用三极管驱动扬声器放音。SPCE061A音频输出共有两个DAC通道,DAC1和DAC2输出的模拟电信号通过DAC1和DAC2引脚输出。DAC的输出范围是0x0000~0xFFFF。DAC1和DAC2的输出数据应写入P_DAC1和P_DAC2单元。上电复位以后,两个DAC均被自动打开,此时会消耗少量的电流(几个毫安)。如若不需要,尽量关闭DAC输出(将P_DAC_Ctrl单元的第一位置为1)。而且DAC的直流电压必须保持平稳地变化,否则可能由于电压的突变引起扬声器产生杂音。为减缓电压的变化幅度,从而输出高质量的音频数据可以采用ramp up/down技术。其应用条件是:被唤醒/上电复位后首次使用DAC时,上电复位功能应在被关闭/进入睡眠状态之前。 放音利用的是SPCE061A内部的DAC,电路参看图 4-8。图中的SPY0030是凌阳公司的产品。和LM386相比,在工作电压上,LM386需在4V以上,而SPY0030仅需2.4V(两节电池)即可工作;在输出功率上,LM386仅在100mW以上,而SPY0030可达700mW。
机器人硬件驱动电路
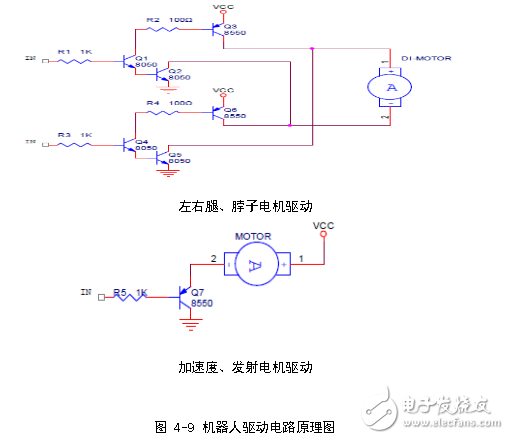
机器人驱动电路采用功率较大的三极管搭成H桥来驱动电机从而实现电机的正向旋转与电机的反向旋转,本系统中使用H桥驱动的电机包括两个用于走路的电机与一个头部转向的电机。同时用了一个三极管驱动单向旋转的电机,如加速电机与发射电机。
语音处理技术本身就是一门理论性强、实用面广而且难度较大的综合学科。而开发出具有语音功能的单片机也是相当困难的。凌阳unsp系列16位单片机,就是适应这种需求而设计的。凌阳SPCE061A实现语音识别其独特之处在于:硬件电路简单,因为SPCE061A是一款专门为语音信号处理设计的单片机,麦克风和喇叭可以直接接入,接放大电路可不用外接。具有一套高效的指令系统,软件编程容易,有相应的API函数,可直接调用。
。 (本文来源网友上传,如有侵权,可联系管理员删除)
版权声明:网站转载的所有的文章、图片、音频视频文件等资料的版权归版权所有人所有。如果本网所选内容的文章作者及编辑认为其作品不宜公开自由传播,或不应无偿使用,请及时联络我们,采取适当措施,避免给双方造成不必要的经济损失。