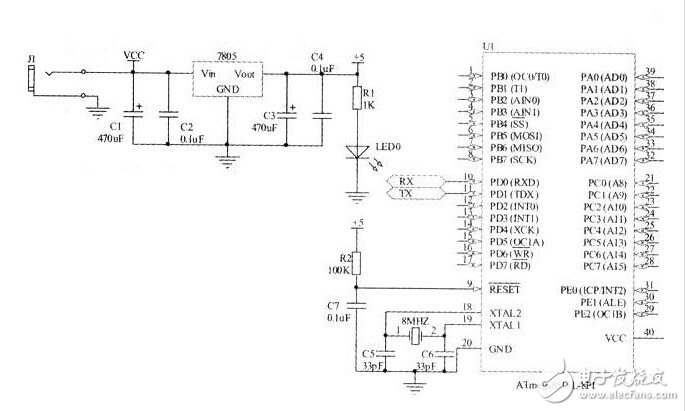
用AVRmega8515作一个带PC机串口通讯的最小单片机机器人控制系统,电路图见下图。使用时用WINDOWS自带的超级终端,把速率调整到9600,8个数据位.1个停止位,无奇偶效验,无流量控制(握手协议Xon/Xoff).接上串口线,按照屏幕提示输入数据就可以直观地控制3台舵机的旋转角度。
以下介绍一款24路机器人专用控制器。其主要是供不熟悉单片机的读者来使用。该系统整体硬件基本和上述最小单片机控制系统一样,还增加了一片采用I2C 总线通讯方式的24C256 EEPROM存储器,用来记录24路庞大的动作表,主控单片机也是AVRmega 8515.整个动作编程通过PC机串口终端仿真器来实现的。可同时控制24台舵机,并且能分别对台舵机进行速度控制,其中可以插入循环、延时指令。该控制器能让制作者从繁琐的单片机编程中解放出来,并且能让有PC机编程能力的读者进行二次开发。
。 (本文来源网友上传,如有侵权,可联系管理员删除)
版权声明:网站转载的所有的文章、图片、音频视频文件等资料的版权归版权所有人所有。如果本网所选内容的文章作者及编辑认为其作品不宜公开自由传播,或不应无偿使用,请及时联络我们,采取适当措施,避免给双方造成不必要的经济损失。